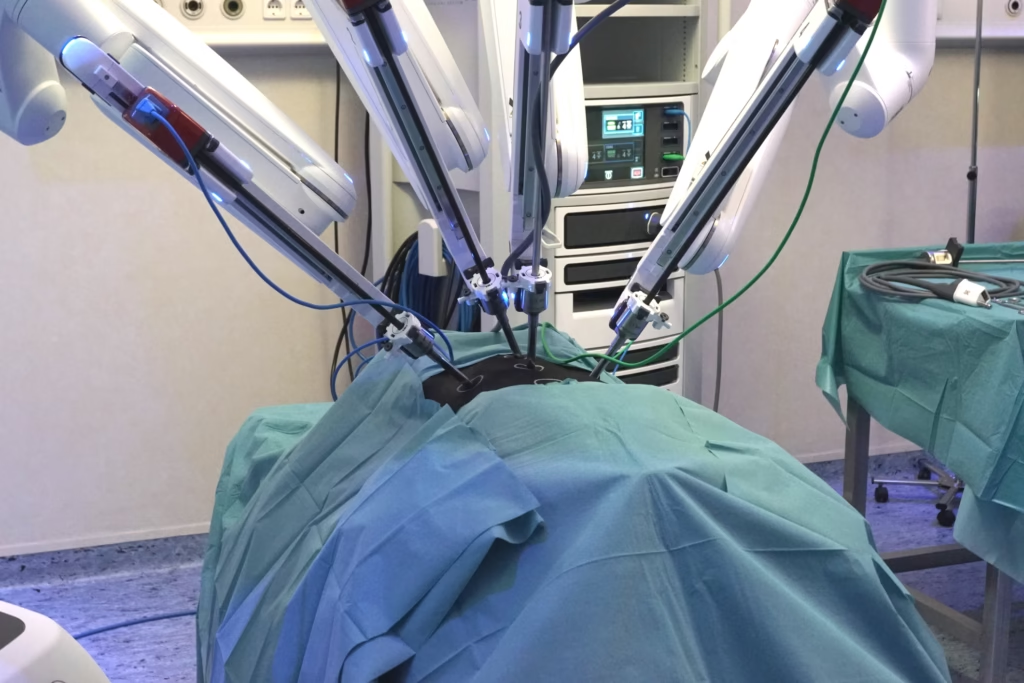
The da Vinci Surgery System is the most universal robot used in Artificial Intelligence Robotic Surgery Systems.
How a robot could be your next surgeon
Artificial Intelligence Robotic Surgery involves minimally invasive surgical procedures that allow doctors to perform complex operations with greater precision and control compared to conventional techniques. The concepts of Cybernetics and Artificial Intelligence are different in many ways. For example, artificial intelligence aims to make computers smarter than cybernetics to understand and build systems that can achieve goals. Therefore, smart computers versus goal-directed systems have developed concepts applicable to robots.
These robotic technology platforms allow for creative interaction between humans and machines. This process, called cybernetics, will deliver innovation through efficient, sustainable and cost-effective products, services and work environments.
Consequently, the robotics and automation revolution is transforming manufacturing, agriculture, healthcare and transport industries. For example, just imagine going into the hospital for cardiac surgery done by robotics with no human intervention. Robotic operations are usually carried out using the da Vinci Surgical System. However, this is no longer regarded as current news within the healthcare sector.
This is in comparison to robots, which are driven by Artificial Intelligence networks. With the advancement of nanorobotic surgery, blockbuster medical devices will be produced in the robotics market and will definitely make the news! For example, in 2017, a Chinese robot called Xiao Yi passed China’s National Medical Licensing Examination and scored first place with 456 points.
The robot’s ability to automatically capture and analyse patient information allowed it to formulate an initial diagnosis. However, it is unclear whether the robot will replace human doctors in the future; at present, the aim is to help improve efficiency. Xiao Yi is part of China’s effort to make Artificial Intelligence central to healthcare and fundamental to the national plan to build a 1 trillion-yuan AI-based industry by 2030.
The word ‘robot’ was first coined by the Czech writer Karl Čapek for his 1920 science fiction play R.U.R. (Rossum’s Universal Robots). However, Karl Čapek did not invent the word, although his brother, the cubist painter Josef Čapek, suggested using it. Also, Isaac Asimov presented the robotic theme in his 1941 story Liar and Runaround.
Runaround was first published in the March 1942 issue of Astounding Science Fiction and appeared in the following works: I, Robot (1950), The Complete Robot (1982), and Robot Visions (1990). Runaround featured Isaac Asimov’s – The Three Laws of Robotics:
- A robot must not put a human being in danger and must prevent a human being from coming to harm.
- A robot must carry out orders given by human beings only if it does not conflict with the First Law.
- A robot must defend its own existence only if it does not conflict with the First or Second Law.
The economic benefits of robots are enormous, especially in the reduction of waiting lists for patients undergoing operations. The opinion is that Artificial Intelligence Robotic Surgery is safer than open surgery. Also, hospital stays are shorter, and therefore, the potential risk of infection is reduced. Another benefit of robotic operations is that they limit blood loss, resulting in reduced transfusions and faster patient recovery.
These robots can work without rest and evaluate patients’ disease states more effectively than their human counterparts. Wireless medical imaging data can be transferred to the robotic doctor to generate a potential diagnosis for the patient. These robotic surgeons are also able to perform various minimally invasive procedures.
Today, robotic surgery is not entirely automated; it consists of miniaturised surgical instruments mounted on robotic arms operated by surgeons. The surgeons control these instruments remotely by using cameras located in the operating room. In 2017, the robotic surgery statistics released by iData Research stated that 693,000 robotic-assisted procedures were performed in the US.
These precision technologies have boosted the surgical robotics market, which is expected to reach $98.7 billion by the end of 2024. The most used robotic system is the da Vinci Surgical System, which has been used in more than 1.5 million surgeries since 2000.
The overall market for 2017 for robotic surgical systems was valued at over $2.4 billion. This market value included minimally invasive surgery such as laparoscopy, gynaecological, digestive tract, urological, cardiac surgeries and colorectal. In addition to radiosurgery, orthopaedic robotic-assisted systems, and robotic surgery equipment for spinal surgery and neurosurgery.
The idea of using remote surgery can be traced back to the 1970s, when NASA was experimenting with the concept by applying it to astronauts in orbit. The premise was that a surgeon could operate a surgical machine located on a space station on Earth. Other programmes included DARPA (Defence Advanced Research Projects Agency), which was involved in developing concepts of remote surgery on the battlefield.
In 1985, the first robot-assisted surgical procedure was performed on a patient using the PUMA 560 robotic surgical arm to carry out a neurosurgical biopsy. This procedure demonstrated the potential for greater precision when used in minimally invasive surgeries, such as laparoscopies, which typically utilise flexible fibre-optic cameras. Consequently, this procedure was completed with greater accuracy – free from hand tremors – during the needle insertion.
In 1987, the first cholecystectomy was also carried out using the same system and in the following year robotic surgery transurethral resection. Then, in 1990, the AESOP system was approved by the Food and Drug Administration (FDA) for its endoscopic surgical procedure.
In 1988, PROBOT was developed at Imperial College London to perform transurethral prostate surgery. This led to other robotic systems, and in 1992, ROBODOC was jointly developed by Integrated Surgical Systems and IBM for hip replacement in human patients.
The advancement in robotic telesurgical concepts and telecommunication technologies enabled the 2001 Lindbergh Operation. The French physician Jacques Marescaux and surgeon Michel Gagner performed a remote gallbladder removal from New York City to a patient in Strasbourg, France. This was a significant breakthrough; however, telesurgery failed to gain widespread popularity.
In 2000, the FDA gave approval for the da Vinci Surgery System to become the first robotic to perform general laparoscopic surgery.
Da Vinci surgery system
Leonardo da Vinci studied the anatomy of the human body under the direction of Andrea del Verrocchio. As an artist, he quickly became a master of topographic anatomy, drawing many studies of muscles, tendons and other visible anatomical features. The da Vinci robot is named after Leonardo da Vinci, who envisaged the future of tetrapod robots.
The da Vinci Surgery System is the universal robot used in Artificial Intelligence Robotic Surgery: since 2017, approximately 4,271 have been installed within the healthcare sector. Moreover, this included 2,770 in the United States, 719 in Europe, 561 in Asia, and 221 in the rest of the world. The da Vinci system used worldwide is designed to perform various minimally invasive surgeries and has been the subject of more than 7,000 peer-reviewed publications and studies. The number of procedures performed throughout the world using the da Vinci robotic system are 1998 (127); 1999 (321); 2000 (1,031); 2001 (2,478); 2002 (5,075); 2003 (9,500); 2004 (16,288); 2005 (26,809); 2006 (49,038); 2007 (85,447); 2008 (132,454).
The da Vinci Surgery System consists of three main parts: the surgeon console, instruments that mimic the human wrists and a viewing system. The principle of the da Vinci Surgery System was that it behaved like a ‘slave’ system. This is because the surgeon operates from the remote console containing the ‘master controllers.’ The objective of these controllers was to provide direct movements of the binocular camera and to initiate the wrist-mimicking instruments. Several surgical instruments are attached to a cart positioned alongside the patient. The surgeon places these instruments in the surgical field before initiating the procedure.
The 3-D surgical view is displayed on a monitor to enable spatial relationships of the instruments while a surgeon is at the console. These included: remote console and surgeon, the elimination of unwanted motion and minimally invasive access.
Hence, unwanted tremors are removed by the action of the robotic arms, which mimic the movements of the human hand. This approach produced a high degree of skill in tight spaces and is capable of generating 3-D visualisation using the binocular camera system.
At the beginning of 2018, a patient had pioneering robotic heart surgery and was recovering at home just 2 days later. The patient was one of the first to benefit from the UK’s only robotic heart and lung surgery programme at Liverpool’s Heart and Chest Hospital. The robot was used to repair a damaged mitral valve. The team of robotic surgeons were able to perform up to 300 heart and lung procedures in their first year.
A Robotic Surgeon is routinely used to perform prostate cancer surgery. In addition, these robots can be used in cardiothoracic surgery to perform endoscopic coronary artery bypass grafting, mitral valve and atrial septal defect repairs. They have also been used for liver resection, pancreatectomy and liver transplantation. Further robotic applications include bariatric surgery, bowel resection, oesophageal fundoplication and cholecystectomy. In gynaecology, robotic surgery has been utilised in hysterectomy and fibroid removal. Other robotic procedures include sleep apnea surgery, paediatric surgeries, and renal cancer procedures, including kidney transplants.
The use of robotic surgical systems – in conjunction with image guidance – such as magnetic resonance imaging (MRI) will lead to minimally invasive surgery especially in sectors where visualisation would be problematic such as neurosurgery. Also, systems that use infrared or ultraviolet light sources will aid precise movement during surgical operations. In addition, fibre-optically delivered lasers and ultrasonic vibratory devices will enable further interaction with multiple tissue types and allow for selective destruction while not damaging healthy tissues.
The advancement of digital cameras will transform the next generation of small robotic systems, enabling surgery to be performed in deep tissue. Also, the development of haptics, an area of tactile feedback technology, will improve precision movements in robotic surgical systems and, therefore, give less stress to the patient.
There are several FDA-approved devices and platforms for robotic surgery, including the da Vinci Surgical System, Sensei X Robotic Catheter System, FreeHand 1.2, and invendoscopy E200 system. Also, approved are Flex® Robotic System, Senhance, ARES, the Single-Port Instrument Delivery Extended Research (SPIDER) and the NeoGuide Colonoscope. Other technology platforms waiting for FDA approval include MiroSurge, ViaCath System, Miniature In Vivo Robot, Master and Slave Transluminal Endoscopic Robot, SPORT™ Surgical System, Einstein Surgical Robot, Verb Surgical, SurgiBot and the Versius Robotic System.
Robotic surgery timeline
Year Surgical System Developer Applications
1961 UNIMATE Unimation, Inc., USA First industrial robot in USA
1967 Versatron American Machine and Foundry First industrial robot in Japan
1978 Unimate Unimation, Inc., USA Electric motor based programmable miniaturised version of Unimate
1979
Definition of “Robot” established Robot Institute of America Reprogrammable, multifunctional manipulator which is designed to move materials, parts and tools. Also, specialised devices through various programmed motions for the performance of a variety of tasks
1980s Telepresence surgical systems Stanford Research Institute (SRI) & National Aeronautics and Space Administration (NASA) Ames Research Anastomosis of femoral arteries
1980s SRI Green Telepresence Surgical System SRI & US Department of Defence Open surgery - military applications
1980s SRI Green Telepresence Surgical System Bowersox and Cornum Nephrectomy, cystotomy closure, ureteral anastomosis
1988 PUMA Imperial College, London, UK Transurethral prostate resection
Late 1980s SARP (Surgeon Assistant Robot for Prostatectomy) Imperial College, London, UK Transurethral prostate resection
1991-1997 PROBOT (Robot for prostatectomies) Harris Transurethral prostate resection (TURP)
1990s ARTEMIS system Schurr Procedures in animal models
1993 HERMES Computer Motion, Goieta, CA Voice-controlled integration of operative room components
1993
AESOP (Automated Endoscopic System for Optimal Positioning) Computer Motion, Goieta, CA Laparoscopic abdominal surgery
1997 Prototype of da Vinci surgical system Intuitive Surgical, Sunnyvale, CA (founded 1995) Laparoscopic surgery
Late 1990s-2001 URobot Nanyang Technological University (NTU - Singapore) TURP, prostate biopsy, brachytherapy seed placement
1997-2002 PAKY (Percutaneous access to the kidney) Johns Hopkins University & Medical Centre Percutaneous access to kidney
1998 Surgeon programmable urological device (SPUD) NTU & Dornier Asia medical TURP, prostate biopsy, brachytherapy seed placement
2000 da Vinci Surgery System Intuitive Surgical Da Vinci robotic system FDA approved
2000 da Vinci Surgical System Intuitive Surgical, Sunnyvale, CA Laparoscopic surgery
2000 da Vinci Surgery System Intuitive Surgical Used for hysterectomies and prostate removals
2001 Zeus Surgical System Computer Motion, Goleta, CA Laparoscopic surgery
2001
Socrates Robotic Telecollaboration System Computer Vision Used for sharing control of AESOP 3000 from different locations
2003
Merger of Intuitive Surgical & Computer Motion
2004
Robotic system
Johns Hopkins University Trans-rectal ultrasound-guided biopsy of the prostate
2005
The Raven I
University Of Washington Used for open-surgery and MIS
2006
Robotic system for TRUS guided brachytherapy Johns Hopkins University Trans-rectal ultrasound-guided brachytherapy
2006
Type S da Vinci robotic system Intuitive Surgical, Sunnyvale, CA Laparoscopic surgery
2007
NeuroArm
University of Calgary and MacDonald Dettwiler Associates Used in neurosurgery for both biopsy and microsurgery
2009
Type Si da Vinci robotic system Intuitive Surgical, Sunnyvale, CA Laparoscopic surgery
2009 Robotic Doppler Micro Probe Vascular Technology, Nashua, NH Doppler for vascular identification during robotic microsurgical procedures
2009 Robotic Doppler MicroProbe Vascular Technology Used for vascular identification in robotic microsurgical procedures
2009 iDrive Intelligent Power Unit Power Medical Interventions Used for resecting and transecting tissue as well as for creating anastomoses between structures
2010 SOFIE "Surgeon’s Operating Eindhoven" Surgical Robot Eindhoven University of Technology 1st surgical robot based on force feedback
2012
The Raven II University Of Washington and UC Santa Cruz Open-Source surgery robot
2012 Amadeus Robotic Surgical System Titan Medical Used for laparoscopic surgery
2018
Versius surgical robotic system CMR Surgical, England Laparoscopic surgery
The robotic revolution
The healthcare sector is booming with surgical robots, and the top 7 companies include:
Advantages of robots
- The application of robotics in medicine allows the advancement of new medical techniques.
- Robots offer precision, reliability, performance and speed during surgical operations.
- Robotic technology is able to be exposed to
- The surgical robot systems do not experience fatigue or tremors.
- Video cameras can be incorporated into the robotic equipment to record the operation.
- Surgical operations can be carried out from different parts of the world.
Disadvantages of robots
- The main problem with robotic technology is the high cost of equipment and
- Surgical robot systems and equipment require advanced software.
- Technological equipment, machines and robotic systems will become obsolete due to the advancement of robotic and Artificial Intelligence platforms.
Conclusion
The Artificial Intelligence Robotic Surgery platform is dominated by the da Vinci system, which has been in operation in the UK since 2001. The da Vinci system is mainly used to perform prostate, bladder and gynaecological surgeries. In 2016, the essential patents for the da Vinci system expired, which will encourage other companies to enter the surgical robotics field. Alphabet has partnered with Johnson & Johnson to form the start-up Verb Surgical. This new venture aims to develop robotics and machine learning tools for surgery. Also, Verb Surgical aims to have robots connected to the internet by 2020 so they can learn from each other.
However, Medtronic, the world’s largest medical device company, also has a surgical robot due for release in 2019. All of these developments will make robots an essential feature in the operating theatre. The present generation of robots is more versatile, compact and cost-effective. This means they can deliver robotic surgery locally, eliminating the need for surgery to be performed in large hospitals.
British scientists have developed the world’s smallest surgical robot, Versius, which can transform everyday operations for tens of thousands of patients. The robot mimics the human arm and can carry out a wide range of laparoscopic procedures. These include hernia repairs, colorectal operations, prostate, ear, nose, and throat surgery. The Versius robot will be the first made-in-Britain surgical robot and is expected to receive a European health and safety approval mark by 2019.
In the future, artificial intelligence robotic surgery will play a more significant role in meeting individuals’ healthcare needs. Robots require a communication link and applications that connect them to their clients or users. These communication links are usually supported through client/server network connections. Therefore, the networking system is vulnerable to cyber-attacks; consequently, the robotic platforms’ security and privacy are paramount.
Disclaimer
The article A bright future for robotic surgery published by Open Medscience on 28 December 2018, is intended for informational and educational purposes only. The content provided does not constitute medical advice, diagnosis, or treatment and should not be relied upon as such. Readers are advised to consult qualified healthcare professionals for medical concerns or decisions regarding surgical procedures.
While efforts have been made to ensure the accuracy of the information at the time of publication, Open Medscience does not guarantee the completeness, reliability, or timeliness of the content. The article discusses developments in robotic and artificial intelligence-assisted surgery, some of which may still be in experimental stages or not widely available. References to specific medical technologies, systems, or companies do not imply endorsement or commercial affiliation.
Open Medscience accepts no responsibility for any loss or damage that may arise from reliance on the information contained within this article.
home » blog » medical robotics »